Here at Adaptive Surveys, we specialise in all-things point cloud. Whether we’re surveying highways or scanning buildings, the majority of our instructions will involve a point cloud at some point in the workflow. Despite having worked with these outputs for nearly a decade I still get strangely enthusiastic when I see a new one take shape. With their adoption in the design world rising at an ever-increasing rate there still seems to be a lot of mystery and an overall lack of clarity over how they’re produced and what they do so I thought I would create this short explainer.
What is a point cloud?
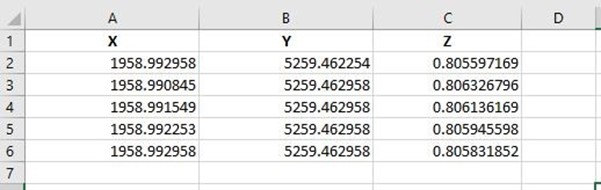
Starting with the basics and at the risk of over-simplifying the issue, point clouds are…a cloud of points. It’s really that simple. It’s just a collection of hundreds, thousands, millions or even billions of individual points that as a minimum each have an X, Y and Z coordinate. They are so simple, in fact, that we can show them as a spreadsheet:
Admittedly this one would be a very small point cloud, but the concept is identical whether you’re dealing with 5 points or 5 billions points – each one, as a minimum, has these 3 co-ordinates. Here’s what a similar point cloud looks like:
You can see that, when grouped together, all of those individual points form a cohesive group and the scene is displayed. Those of you familiar with point clouds will have seen colourised versions and these are no more advanced than the greyscale one above. The main difference being we add a colour value to each point in the form of Red, Green and Blue:

And here’s that same point cloud but with the addition of a colour code for each point:
Colourised point clouds look great and add a greater degree of context to the scene. They are, however, much larger files (the full file above is 45GB) so better suited to high-performance machines.
So now we know what a point is the next question is: how do we produce one?
Capturing the Data
There are many, many different techniques available to us for building point clouds but for the purposes of this article we’ll stay above ground with photogrammetry, static LiDAR and dynamic LiDAR. But first – a note on survey control.
“If you intend to use your point cloud for accurate measurement you will need survey control”
When requesting point clouds, most of our clients are using these for measurement purposes. Whether that’s for stockpile volume analysis or road feasibility studies, an understanding of the distance between 2 points is usually a core requirement and if you intend to use your point cloud for accurate measurement you will need survey control. This can be in the form of Ground Control Points (GCPs) which are visual targets or even simple check grids taken across the area of interest. The control is usually installed with traditional survey equipment such as GNSS antennas or Total Stations. Competent surveyors do this as a matter of course and it is a vital component of point cloud surveying. If you are instructing a point cloud, always ask for a QA/QC report and always use a qualified surveyor.
OK, back to the point clouds.
Photogrammetry
In its simplest form, photogrammetry is the science of taking measurements from photographs and involves the comparison of the same feature in 2 different images taken from different locations. In the same way as your eyes produce depth, when undertaken millions of times across multiple images this comparison produces a set of measurements which each have an X, Y and Z coordinate. As we know, this is a point cloud in its most basic form. As software develops, the algorithms involved become more sophisticated and the results are truly astounding. The line between reality and computer modelling is becoming increasingly blurred.
Photogrammetry provides a nice, colourised point cloud with the RGB values extracted from the source imagery. For bare-earth sites photogrammetry is a fantastic tool and we see accuracies down to +/-25mm when compared against our control network. The key disadvantage to this method is its inability to penetrate vegetation. We can only survey what we can see and if you’ll look closely at the image above, you’ll see holes under the tree canopy. Therefore, if you have a site to survey and you need ground points under trees then this isn’t the methodology for you and I’d be very wary of claims to the contrary. So, what do you do if you need those points under vegetation? Time to deploy the lasers…
Static LiDAR
LiDAR = Light Detection and Ranging. It sounds cool and for survey nerds like me it really is cool, but the concept is relatively simple. We place a scanning system in the middle of our scene and set everything up. The system will take hundreds of thousands of measurements a second in a 360-degree sphere by firing out a laser beam and measuring the length of time it takes for it to bounce off an object and return to the scanner. It will then calculate the coordinate of those measurements and provide (you guessed it) a point cloud full of Xs and Ys and Zs. We then move the scanner to the next position and continue the process.
Once back in the office we ‘register’ one scan against the next. This involves finding commonality between each point cloud such as a plane/surface or perhaps chequer targets and then stitching the individual scans together to form one large point cloud. I’ll admit this can get a little out of hand and our surveyors regularly start chasing that last millimetre of alignment perfection but it’s all worth it in the end.
With internal accuracies approaching +/-3mm, static LiDAR is a fantastic tool and we often use it in urban environments where the regularity of building walls and roof tops allows us to register the scans with precision. It does, however, take quite a long time. Even with individual scan durations taking <3 minutes for the latest LiDAR sensors, the sheer number of scans all adds up. As for vegetation, we can now find those gaps in the foliage and start collecting points underneath where photogrammetry can’t go with some LiDAR sensors supporting multiple returns providing an even greater degree of penetration.
Dynamic LiDAR
Static LiDAR is great but being rooted to the one spot brings its own inefficiencies. The ability to move the sensor through our area of interest and continually scan would allow us to cover a much greater area in a relatively short space of time and to do this we need to understand where that sensor is in relation to the measured point to accurately determine range and therefore the point coordinates. Sounds complex (and it is) so I’ll try to simplify it as much as I can. There are 2 things we need to know – 1) where is the LiDAR sensor and 2) which way is the sensor pointing? To answer point 1, we use a GNSS antenna to give us a real-world coordinate and we should get down to about +/-20mm if not better with today’s receivers. To answer point 2, we need an Inertial Measurement Unit (IMU) which contains a host of fancy gadgets and sensors. Your phone probably has one and it allows you to play games by moving your handset about although in the survey world we use much more accurate systems. By combining all of these measurements together we produce a system which is capable of accurately recording measurements down to about +/-40mm whilst on the move.
The world is now our oyster. We mount the systems on drones, boats, robotic crawlers, cars and anything in between. If we can physically get access to a space then the chances are we’ll be able to get a dynamic LiDAR system in there. Even GPS denied environments are now possible with the development of Simultaneous Location and Mapping (SLAM) algorithms but we’ll save those for another day. Again, we need to install control networks to be able to qualify our data but the degree of efficiency we can generate is staggering.
Using Point Clouds
I know I’ve spent the preceding paragraphs telling you how amazing point clouds are but there is one shameful truth that we haven’t mentioned yet: from a survey perspective, point clouds are useless. It hurts me to type it but it’s true. Without a further analysis or modelling of a point cloud it doesn’t really do much. It certainly looks great and I have lost hours of my time on occasion by simply spinning them round in 3D viewers but if you want to really benefit from this process then we’ll need to take it a step further. The design world is used to 2D, 3D DWG files and with Revit increasing in popularity, this is where we need to take our survey.
Step 1: Cleaning

Does what is says on the tin, we need to clean the point cloud to get rid of stray points or structures we don’t need. In Aberdeen we accidentally scan seagulls more often than I’d like. It can be a laborious task but removing them (from the point cloud, not real life) and all the other bits we don’t need gives us a nice starting point for further work.
Step 2: Filtering
What we do here really depends on what our clients’ need. If we’re producing a DTM from LiDAR, then we need to remove the vegetation. If we’re producing a DSM, then we only need the upper-most points in the cloud so we’ll remove all others. We may also have quite a ‘noisy’ point cloud for various reasons, so we’ll apply algorithms to produce best-fit planes.
Step 3: Digitising
Steps 1 and 2 provide us with a great foundation for an end result but step 3 is where the magic happens. We use the geometry from the point cloud to produce line drawings and 3D models in the standard industry formats. Sounds simple but I can assure you it’s far from easy. The team is adept at highlighting features and getting the most out of the data but sometimes it looks as though they’re locked in the matrix and to them it probably feels that way. There are some features which may not be visible in the data irrespective of the methods used and this is where being transparent with our clients is vital. We might still collect surface features such as utility covers or hidden fence lines by traditional means and this is usually highlighted at the project outset. Provided we use the same coordinate reference system then everything will fit in the right place.
One of the key benefits of point cloud surveying is the sheer volume of data available at your fingertips. Practically any grid size can be produced, and varying degrees of complexity can be added to the drawing without having to send survey teams back out to site if your requirements change.
Summary
So, there we have it, point clouds in a nutshell. Fast, slow, accurate, inaccurate, too much data and not enough data – all of these labels can be applied to the technology. What is clear, however, is that they are a hugely valuable tool in a surveyor’s toolkit and when combined with traditional survey methodologies and a bit of imagination the sky’s the limit.







